VRS後処理
UAV写真現像の速度検証
2016年3月26日
UAVによる空撮で決められたインターバルでカメラのシャッターを切ります。 弊社採用のシンクロ撮影は1/1000秒単位でGNSSデータと写真をマッチングさせるため カメラシャッター速度は遅くすることはできません。 遅くすれ […]

標準偏差5cm以下を実現
2016年2月17日
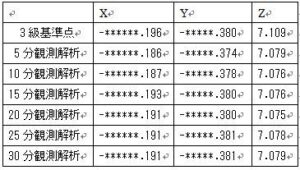
後処理連続キネマ解析による解で超高精度な位置情報を写真の主点座標として付加し GCP点無し、いわゆる外部標定だけでX,Y,Zの標準偏差5Cm以下にもって行く事ができました。 GCP点が設定してないのでエラー警告が出ます。 […]
測量・地理空間情報 イノベーション大会
2015年7月2日
6月23日、24日に東京大学 弥生講堂で開催された 「測量・地理空間情報 イノベーション大会」に参加してきました。 初日は、メイン会場の講演に参加し2日目は、3会場もあり全てに参加できないので 「測位の最新動向を知る」、 […]

UAVカメラシャッター位置のお話
2015年5月22日
飛行計画を立てて計画で決められたインターバルでカメラのシャッターを切っていきます。 シャッターを切った時間とGPSの情報を同期させます。 単独測位 DGPS 後処理キネマティックではどれほどの差があるのでしょう と、比較 […]

VRS後処理キネマティック、ようやく終わりました。
2011年12月29日
過去に例のない悪条件の中 なんとか無事観測終了です。 15地点の観測とキャリブレーション を3地点行いました。地点観測状況 見た目、そんなに悪条件には 見えませんよね でも、5衛星ギリギリDOP値もヒヤヒヤ 他の地点 & […]
『緯度・経度・標高観測』その2
2011年11月4日
その1の続きです。より簡便で精度を保つ 『VRS後処理キネマティック』の手法を採用しようと思います。後処理解析なのでリスクは伴いますが…スタティック法は非常にポピュラーで一番多く使われてる方法だと思います。 が、キネマテ […]