NMEA出力
GPSを連動させて深浅測量を行う場合
パソコンにGPSを接続します。
その際、GPSからNMEA出力の設定を受信機側で行います。
実にさまざまな情報が流れ込みます。測位時間、緯度、経度、高度、GPSステータスなどなど・・・
NMEAの出力間隔は最短で0.2秒間隔で設定できます。
1秒で5発もデータが流れこんできます。
パソコンにGPSを接続します。
その際、GPSからNMEA出力の設定を受信機側で行います。
実にさまざまな情報が流れ込みます。測位時間、緯度、経度、高度、GPSステータスなどなど・・・
NMEAの出力間隔は最短で0.2秒間隔で設定できます。
1秒で5発もデータが流れこんできます。
音響測深機のデータも1秒に6発水深を観測します。
同じように観測時間とその時の水深が
パソコンに流れ込んできます。
最終的に時間の同期化を行い3次元データを生成します。
通常はディファレンシャルGPSを使用します。
水平位置誤差はサブメートル(0.8Cm)くらいです。
高さは残念な事に観測値として使えるものではありません(2mくらいの誤差)
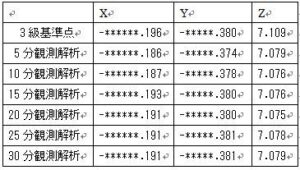
ディファで行う場合は、必ず15分~30分単位で潮位を観測します。
RTK法で深浅測量を行う場合は、水平も垂直もRTKで観測されたデータを
そのまま使う事が出来ます。
気をつけなければならないのが、NMEAデータの高さはGPS受信機の
位相中心の高さが流れてきます。
データをそのまま使うと位相中心から水面までの高さが反映されず
間違った地盤高を計算する事になります。
一番手っ取り早いのが、同期化させて最終の解析結果まで3次元の座標を計算したら
一律、位相中心から水面までの距離(アンテナ高)をドカンっ!と差し引くのが
良いかと思います。