その1の続きです。より簡便で精度を保つ
『VRS後処理キネマティック』の手法を採用しようと思います。後処理解析なのでリスクは伴いますが…スタティック法は非常にポピュラーで一番多く使われてる方法だと思います。
が、キネマティックは…、弊社でもあまり使いません。RTK法がある昨今、後処理キネマティックを使うタイミングがありません。
が、今回はそうはいきません。
その1でも書きましたが現場状条件が非常に悪い。
『VRS後処理キネマティック』の手法を採用しようと思います。後処理解析なのでリスクは伴いますが…スタティック法は非常にポピュラーで一番多く使われてる方法だと思います。
が、キネマティックは…、弊社でもあまり使いません。RTK法がある昨今、後処理キネマティックを使うタイミングがありません。
が、今回はそうはいきません。
その1でも書きましたが現場状条件が非常に悪い。
キネマティック法は、固定局に1台移動局で1台
最小衛星数5個以上、観測時間1分以上、データ取得間隔5秒以下
同時間観測を行いベクトルが1本生成され基線解析を行います。
基準点に取り付けるわけではないので
いわば、単観測です。放射ですね
精度管理は出来ませんので
時間をずらして2セット観測し較差で可否を判断するしかありません。
公共測量作業規程では4級基準点に準用できます。
今回は固定局を設置する事が不可能。
と、言う事で『VRS後処理キネマティック』を試みてみます。
ボーリング調査ポイントでキネマティック移動局観測をデータ取得間隔1秒で最大30分
お許しを頂き観測を行う予定です。
もっとも、DOP値と衛星数が良ければ5分観測もいけるでしょう
監視しながら観測してみます。
キネマティック固定点は仮想点。
弊社はジェノバ様と契約してますので
固定仮想点の緯度、経度、楕円高及び移動局で観測した
観測日観測時間をWEB上で申し込みます。
1時間ほどでジェノバ様より、最寄の電子基準点より
仮想点を生成してくれ、ダウンロードできます。(もちろん有料サービスです)
現場ではインターネット環境がないので
移動局観測を終了したら、車ですたこらさっさと
インターネットが出来る場所まで移動し
基線解析を行う予定です。
これなら、もしFIX解を得られなかっても
再測は可能かと踏んでます。(甘いかな・・・)
なかなかマニアックな手法ではありますが
頑張ってみます。
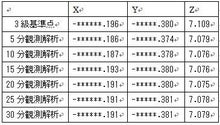
他現場での、観測ほやほやの3級基準点で精度検証結果。
VRS-RTKよりも現実的かなと感じています。
弊社も使ったことがありませんので、興味津々です。
>今川さん
この手法、個人的にはアリかな?
と思います。
明日、一発目観測です。
また、UPしますね。