RTK-GPS深浅測量の勧め
GPSを使った深浅測量には用途や精度により色々な組み合わせがあります。港湾や河川等での深浅測量では潮の満干があるため、事前に検潮場を設け
30分間隔で潮位を観測しておきます。後処理解析の時、観測時間の潮位で補正をしなければいけません。ため池やダム等の終日水位が変化しないような場所では特に潮位補正は必要ありません。
30分間隔で潮位を観測しておきます。後処理解析の時、観測時間の潮位で補正をしなければいけません。ため池やダム等の終日水位が変化しないような場所では特に潮位補正は必要ありません。
使用するGPS受信機はDGPS(ディファレンシャル)を使用します。
X,Yの位置誤差は約70Cm程度
Z値(いわゆる標高値)はX,Yの2倍と推測してもよいでしょう
つまり1.5mくらいは軽く誤差がありますのでGPSデータのZ値の使用は出来ません。
そのため音響測深機での水深データを使用し解析を行います。
ここで問題なのが下図のとおり
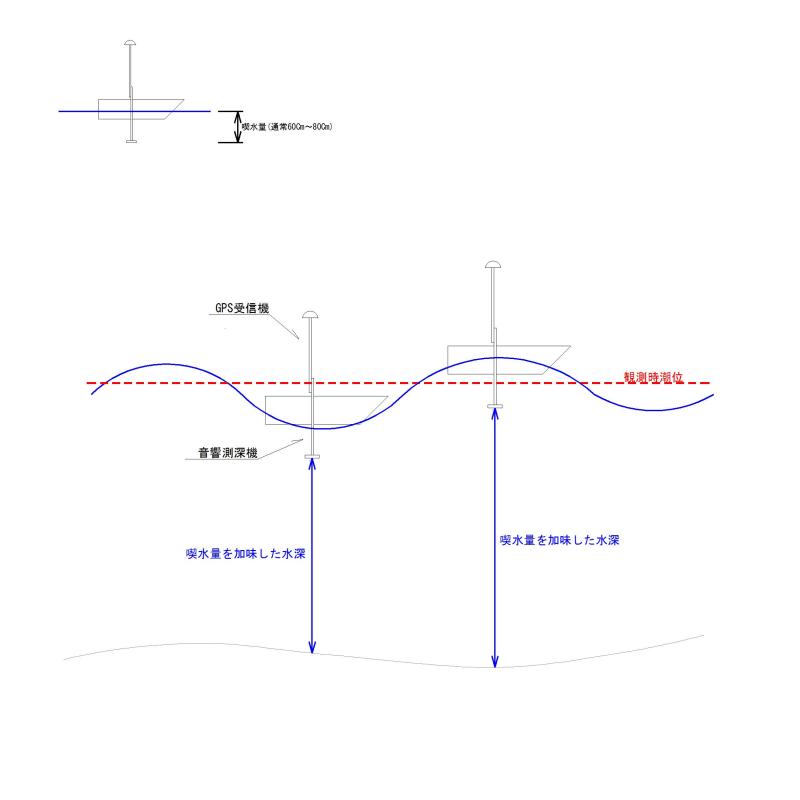
港湾や河川では当然、観測中波が発生します。
計算では観測時の潮位を使用するのですが、測量船が波高位置、波低位置の時
水深値に波の高さ分、測量船のゆれによる誤差が出ます。
水部だから静止できないしこれをOKとするか否かは監督員の指示を仰ぎますが
通常はこんな細かいところはイコールで処理してくれれば良い。
と言う見解が大半です。
もっとも波の高い時には測量は行いませんが…
ただ、より高精度に行う為の方法はあります。
推奨としては
下図のとおり
DGPSはZ値の精度が良くありませんので
GNSS受信機でRTK方式を採用します。
どんなメリットがあるか…
X,Yの位置誤差は500円玉圏内
Z値もMAXで5Cm程度
潮位補正を必要としないため、船の揺れ波の影響を受けない。
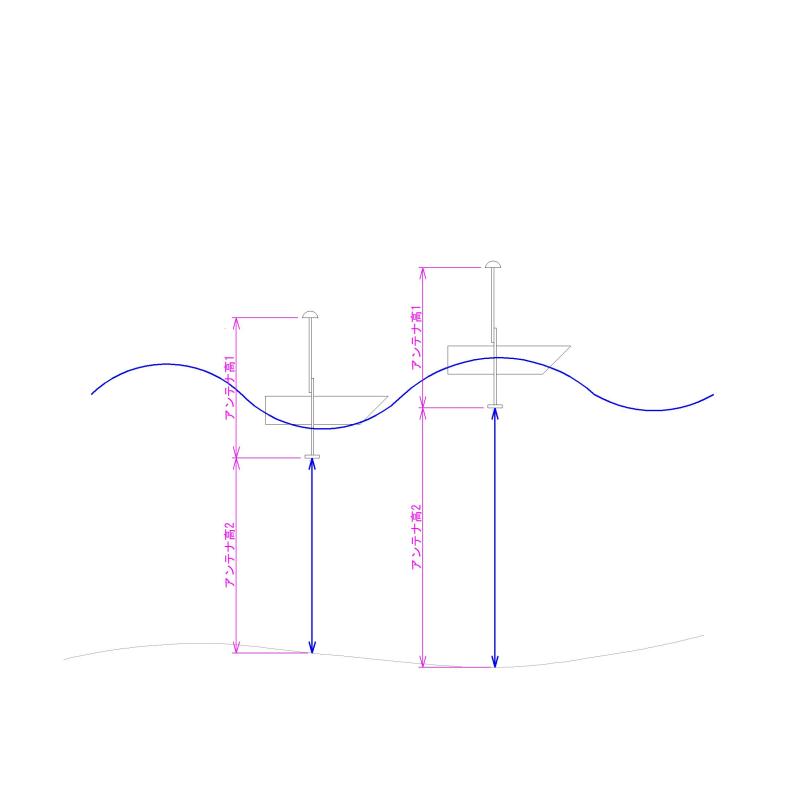
船位置が波高位置だろうが波低位置であろうが
その時の水深値を記録してます。(アンテナ高2)
GNSS受信機も設定の際、アンテナ高1を入力しておきます。
結果、アンテナ高1+アンテナ高2を考慮した値が地盤高となるわけです。
30分に1回行う検潮場での潮位測定が要らないのは、人的にも削減でき
低コスト高精度が生まれます。
\ 最新情報をチェック /